
آلة آتوود


رسم توضيحي لآلة آتوود، 1905.
اخترع القس جورج آتوود آلة آتوود (أو جهاز آتوود) في عام 1784 كتجربةٍ معملية من أجل إثبات قوانين الحركة الميكانيكية من خلال التسارع الثابت. وتُعد آلة أتوود وسيلةً تعليميةً شائعة في الفصول الدراسية وتُستخدم لشرح مبادئ الميكانيكا الكلاسيكية.
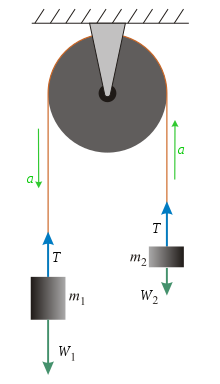
تتكون آلة آتوود المثالية من كتلتين m1 وm2، متصلتين بحبل غير قابل للمد وعديم الكتلة يلف حول بكرة مثالية عديمة الكتلة. [1]
عندما تكون m1 = m2، تكون الآلة في حالة توازن محايد بغض النظر عن وضع الأوزان.
عندما تكون m1 ≠ m2؛ يحدث تسارع منتظم لكلتا الكتلتين.
معادلة التسارع الثابت

يمكننا استنتاج معادلة للتسارع من خلال استخدام تحليل القوى. فإذا نظرنا إلى حبل عديم الكتلة وغير قابل للمد وبكرة مثالية عديمة الكتلة، فستكون القوى التي يجب أخذها في الاعتبار فقط هي: قوة الشد (T)، ووزن الكتلتين (W1 وW2). لإيجاد التسارع، يجب الأخذ في الاعتبار القوى المؤثرة على كل كتلة مفردة. ومن خلال استخدام قانون نيوتن الثاني (حيث تفيد مصطلحات الإشارات أن {\displaystyle m_{1}>m_{2}})، يمكننا استنباط نظام معادلات للتسارع (a).

كاصطلاح للإشارة، نفترض أن a تكون موجبة عندما تتسارع نزولاً لـ {\displaystyle m_{1}}, وأن a تكون موجبة عندما تتسارع صعودًا لـ {\displaystyle m_{2}}.. ومن ثم يكون وزن {\displaystyle m_{1}} و{\displaystyle m_{2}} هو ببساطة {\displaystyle W_{1}=m_{1}g} و{\displaystyle W_{2}=m_{2}g} على التوالي.




القوى المؤثرة على m1:
{\displaystyle \;m_{1}g-T=m_{1}a}

والقوى المؤثرة على m2:
{\displaystyle \;T-m_{2}g=m_{2}a}

وبجمع المعادلتين السابقتين، نحصل على
{\displaystyle \;m_{1}g-m_{2}g=m_{1}a+m_{2}a},

وتصبح الصيغة النهائية للتسارع لدينا
{\displaystyle a=g{m_{1}-m_{2} \over m_{1}+m_{2}}}

وبالعكس، يمكن إيجاد التسارع الناجم عن الجاذبية،g، عن طريق ضبط توقيت حركة الأوزان وحساب قيمة التسارع المنتظم a: {\displaystyle d={1 \over 2}at^{2}}.

تُستخدم آلة آتوود أحيانًا لشرح طريقة لاغرانج لاستنباط معادلات الحركة.
معادلة الشد
قد يكون من المفيد معرفة معادلة شد الوتر. لتقدير الشد، يتم تعويض المعادلة بالتسارع في أيٍ من معادلتيّ القوى.
{\displaystyle a=g{m_{1}-m_{2} \over m_{1}+m_{2}}}
على سبيل المثال، عند التعويض بـ {\displaystyle m_{1}a=m_{1}g-T}، نحصل على

{\displaystyle T={2gm_{1}m_{2} \over m_{1}+m_{2}}}

يمكن إيجاد الشد عن طريق استخدام هذه الطريقة.
معادلات لبكرة بها قصور واحتكاك
بالنسبة للاختلافات الصغيرة جدًا بين كتل m1 وm2، لا يمكن تجاهل العطالة الدورانية I لبكرة نصف قطرها r. ويتم الحصول على التسارع الزاويّ للبكرة من خلال وضع عدم الانزلاق:
{\displaystyle \alpha ={a \over r},}

حيث تكون {\displaystyle \alpha } هي التسارع الزاويّ. فبالتالي يكون عزم الدوران هو:

{\displaystyle \tau _{net}=\left(T_{1}-T_{2}\right)r-\tau _{friction}=I\alpha }

بضم قانون نيوتن الثاني للكتل المعلقة، وحل T1 وT2، وa، نحصل على:
التسارع:
- {\displaystyle a={{g(m_{1}-m_{2})-{\tau _{friction} \over r}} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

الشد في أقرب جزء من الوتر لـm1:
- {\displaystyle T_{1}={{m_{1}g(2m_{2}+{{I} \over {r^{2}}}+{{\tau _{friction}} \over {rg}})} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

الشد في أقرب جزء من الوتر لـm2:
- {\displaystyle T_{2}={{m_{2}g(2m_{1}+{{I} \over {r^{2}}}+{{\tau _{friction}} \over {rg}})} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

في حال تجاهل الاحتكاك (وليس قصور البكرة ولا قوة سحب الوتر على حافة البكرة)، يمكن تبسيط تلك المعادلات في صورة النتائج التالية:
التسارع:
- {\displaystyle a={{g(m_{1}-m_{2})} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

الشد في أقرب جزء من الوتر لـm1:
- {\displaystyle T_{1}={{m_{1}g(2m_{2}+{{I} \over {r^{2}}})} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

الشد في أقرب جزء من الوتر لـm2:
- {\displaystyle T_{2}={{m_{2}g(2m_{1}+{{I} \over {r^{2}}})} \over {m_{1}+m_{2}+{{I} \over {r^{2}}}}}}

تطبيقات عملية
تشير رسوم آتوود الإيضاحية الأصلية إلى استناد محور العجلة الرئيسي على حواف أربع عجلات أخرى، لتقليل قوى الاحتكاك الناتجة عن المحامل. وتتبع العديد من التطبيقات التاريخية القديمة هذا التصميم.
تقارب فكرة المصعد الذي يضم ثقل موازن فكرة آلة آتوود المثالية، حيث يتم من خلالها تخفيف ثقل حمل مقصورة المصعد عن محرك القيادة – ويكون عليه فقط التغلب على فرق الوزن وقصور كلتا الكتلتين. ويتم تطبيق الفكرة ذاتها على سكك حديد القطار الجبلي المائل الذي يتكون من عربتين متصلتين على مسارات مائلة.
ــــــــــــــــــــــــــــــــــــــــــ
معادلة الشد
قد يكون من المفيد معرفة معادلة شد الوتر. لتقدير الشد، يتم تعويض المعادلة بالتسارع في أيٍ من معادلتيّ القوى.
a g m_1-m_2 over m_1 + m_2
على سبيل المثال، عند التعويض بـ m_1 a m_1 g-T، نحصل على
T 2 g m_1 m_2 over m_1 + m_2
يمكن إيجاد الشد عن طريق استخدام هذه الطريقة.
معادلات لبكرة بها قصور واحتكاك
بالنسبة للاختلافات الصغيرة جدًا بين كتل < >m1 و< >m2، لا يمكن تجاهل عزم العطالة العطالة الدورانية < >I لبكرة نصف قطرها r. ويتم الحصول على التسارع الزاويّ للبكرة من خلال وضع عدم الانزلاق
alpha aover r ,
حيث تكون alpha هي التسارع الزاويّ. فبالتالي يكون عزم الدوران هو
au_ net (T_1 – T_2
ight)r – au_ friction I alpha
بضم قانون نيوتن الثاني للكتل المعلقة، وحل < >T1 و< >T2، و< >a، نحصل على
التسارع
- a g (m_1 – m_2) – au_ friction over r over m_1 + m_2 + I over r^2
الشد في أقرب جزء من الوتر لـ< >m1
- T_1 m_1 g (2 m_2 + I over r^2 + au_ friction over r g ) over m_1 + m_2 + I over r^2
الشد في أقرب جزء من الوتر لـ< >m2
- T_2 m_2 g (2 m_1 + I over r^2 + au_ friction over r g ) over m_1 + m_2 + I over r^2
في حال تجاهل الاحتكاك (وليس قصور البكرة ولا قوة سحب الوتر على حافة البكرة)، يمكن تبسيط تلك المعادلات في صورة النتائج التالية
التسارع
- a g (m_1 – m_2) over m_1 + m_2 + I over r^2
الشد في أقرب جزء من الوتر لـ< >m1
- T_1 m_1 g (2 m_2 + I over r^2 ) over m_1 + m_2 + I over r^2
الشد في أقرب جزء من الوتر لـ< >m2
- T_2 m_2 g (2 m_1 + I over r^2 ) over m_1 + m_2 + I over r^2
تطبيقات عملية
تشير رسوم آتوود الإيضاحية الأصلية إلى استناد محور العجلة الرئيسي على حواف أربع عجلات أخرى، لتقليل قوى الاحتكاك الناتجة عن المحامل. وتتبع العديد من التطبيقات التاريخية القديمة هذا التصميم.
تقارب فكرة المصعد الذي يضم ثقل موازن فكرة آلة آتوود المثالية، حيث يتم من خلالها تخفيف ثقل حمل مقصورة المصعد عن محرك القيادة – ويكون عليه فقط التغلب على فرق الوزن وقصور كلتا الكتلتين. ويتم تطبيق الفكرة ذاتها على سكك حديد القطار الجبلي المائل الذي يتكون من عربتين متصلتين على مسارات مائلة.
Atwoods machine.png 150 رسم توضيحي لآلة آتوود، 1905.
اخترع القس جورج آتوود آلة آتوود (أو جهاز آتوود) في عام 1784 كتجربةٍ معملية من أجل إثبات قوانين نيوتن للحركة قوانين الحركة الميكانيكية من خلال تسارع التسارع الثابت. وتُعد آلة أتوود وسيلةً تعليميةً شائعة في الفصول الدراسية وتُستخدم لشرح مبادئ ميكانيكا كلاسيكية الميكانيكا الكلاسيكية .
تتكون آلة آتوود المثالية من كتلتين < >m1 و< >m2، متصلتين بحبل علم الحركة حبل غير قابل للمد غير قابل للمد وعديم الكتلة يلف حول بكرة مثالية عديمة الكتلة.
مرجع كتاب الأخير Tipler الأول Paul A.
العنوان Physics For Scientists and Engineers, Third Edition, Extended Version الناشر Worth Publishers سنة 1991 مكان New York
الرقم المعياري 0-87901-432-6 Chapter 6, example 6-13, page 160.
عندما تكون m1 m2، تكون الآلة في حالة توازن محايد بغض النظر عن وضع الأوزان.
يمكننا استنتاج معادلة للتسارع من خلال استخدام تحليل القوى.
فإذا نظرنا إلى حبل عديم الكتلة وغير قابل للمد وبكرة مثالية عديمة الكتلة، فستكون القوى التي يجب أخذها في الاعتبار فقط هي قوة الشد (< >T)، ووزن الكتلتين (< >W1 و< >W2). لإيجاد التسارع، يجب الأخذ في الاعتبار القوى المؤثرة على كل كتلة مفردة.
ومن خلال استخدام قانون نيوتن الثاني (حيث تفيد مصطلحات الإشارات أن m_1>m_2)، يمكننا استنباط معادلات مترابطة نظام معادلات للتسارع (< >a).
كاصطلاح للإشارة، نفترض أن < >a تكون موجبة عندما تتسارع نزولاً لـ m_1, وأن < >a تكون موجبة عندما تتسارع صعودًا لـ m_2.. ومن ثم يكون وزن m_1 وm_2 هو ببساطة W_1 m_1 g وW_2 m_2 g على التوالي.
m_1g-T m_1a
T-m_2g m_2a
وبجمع المعادلتين السابقتين، نحصل على
m_1g-m_2g m_1a+m_2a,
وتصبح الصيغة النهائية للتسارع لدينا
a g m_1-m_2 over m_1+m_2
وبالعكس، يمكن إيجاد التسارع الناجم عن الجاذبية،< >g، عن طريق ضبط توقيت حركة الأوزان وحساب قيمة التسارع المنتظم < >a d 1 over 2 at^2 .
تُستخدم آلة آتوود أحيانًا لشرح ميكانيك لاغرانج طريقة لاغرانج لاستنباط معادلات الحركة.